

Funding for research to coordinate aerial and aquatic robots could improve emergency response

Researchers at Virginia Tech have been awarded nearly $900,000 by the National Science Foundation to improve emergency response by developing methods to coordinate teams of aerial and surface vehicles.
During an aquatic emergency such as an oil spill or radiation leak, these vehicles could autonomously assess the extent of the contamination and transmit critical data to first responders.
Leading the project are David Schmale, a professor of food safety and plant biosecurity in the College of Agriculture and Life Sciences, who has developed methods for using autonomous vehicles to detect contaminants, and Pratap Tokekar, an assistant professor of electrical and computer engineering in the College of Engineering who works on algorithms that enable robots to sense and gather data.
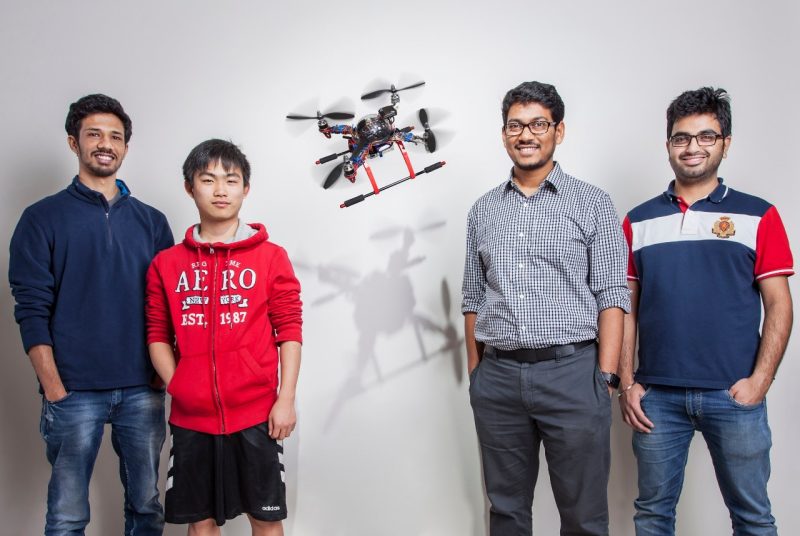
From left: Aravind Premkumar, computer engineering undergraduate student; Kevin Yu, electrical engineering doctoral student; Pratap Tokekar, assistant professor of electrical and computer engineering; and Ashish Budhiraja, computer engineering undergraduate student, are developing autonomous robots to detect and track hazardous agents in the environment.
The research will require them to tackle a notoriously difficult problem in robotics: how to process and integrate information from different sources.
Unmanned aerial vehicles equipped with cameras or other sensors can map a contaminated area and measure the extent of a spill; vehicles on the surface of the water can take physical samples in localized areas. Combining data from the two types of vehicles could yield information about both the scope and nature of the pollution.
“You have a certain efficiency with the boat alone and with the aircraft alone, but when you couple them you achieve a whole new level of efficiency. And that’s the most important part,” Schmale said.
The aerial vehicles can act as scouts, flying higher for a broader view or lower for finer detail. Using this data, they can direct the surface vehicles to the best locations for sampling.
“What we are really trying to do is come up with algorithmic tools so that the robots can share data among themselves and autonomously plan their paths,” Tokekar said. “And the ultimate hope is to have this in a loop with the emergency responders, to inform them of the extent and nature of the threat, so they can plan a better course of action.”
If the vehicles decide autonomously where to deploy and collect data, and how much information to exchange, the system can assemble a comprehensive picture of the contamination without endangering first responders, and freeing them to focus on other tasks.
The researchers will use commercially available aircraft modified with a small computer to allow on-board data processing and wireless communication with other vehicles. The surface vehicles will include a custom 3-D printed science package with a variety of sensors and sampling capabilities.
Schmale and Tokekar have already conducted preliminary experiments, supported in part by funding from the Institute for Critical Technology and Applied Science; now, the team is gearing up for small-scale testing at local ponds this fall.
They want to ensure that the system is intuitive for first responders to use, providing clear, actionable information quickly. So the researchers will field-test their prototypes with the Virginia Tech Rescue Squad, a student group that handles around 1,200 calls every year. Their expertise will help inform the development of a system that would be useful in a real-world emergency situation.
“The engagement of the Virginia Tech Rescue Squad is going to be key to the success of our project,” Schmale said.
The grant also includes funding to develop a robotics unit for a local high school. Using 3-D printers and the high school’s design bay, students will explore how to design an efficient sampling system for an autonomous surface vehicle.



.jpg.transform/m-medium/image.jpg)