



2 College of Engineering robotics teams prep for DARPA Robotics Challenge finale
Editor's note: This story was updated to correct the spelling of Professor Tomonari Furukawa's name.
BLACKSBURG, Va., June 1, 2015 – Two Virginia Tech-affiliated teams are now in California for the finale of the DARPA Robotics Challenge, a worldwide competition to build prototype humanoid robots that can respond to disasters natural or man-made.
The teams – VALOR, headed by the Terrestrial Robotics Engineering & Controls (TREC) Lab based in the Virginia Tech College of Engineering, and ViGIR, headed by Blacksburg-based tech firm TORC Robotics and the German-based Technische Universitat Darmstadt with assistance from the Virginia Tech Department of Computer Science – are competing for $2 million and the prestige of building a robot to assist human first-responders in dangerous response efforts.
A total of $3.5 million is at stake, with $1 million for second place and $500,000 for third place.
The finale is Friday and Saturday, June 5-6, at Los Angeles County’s Fairplex in Pomona, California. Thousands of spectators are expected. Competition events will be live-streamed by DARPA, short for the Defense Advanced Research Projects Agency, the research arm of the U.S. Department of Defense.
Team VALOR will bring its self-built humanoid robot ESCHER – assembled at Goodwin Hall – to the competition. Team ViGIR will bring a Boston Dynamics-built Atlas robot named Florian, one of seven of the 25 competing teams to do so. Both VALOR and ViGIR received agency funding to compete.
“The DARPA Robotics Challenge is a challenge to the real world requiring the cognition, perception, communication, control, and autonomy capabilities of the robot operator in addition to the humanoid robot,” said Tomonari Furukawa, professor in the Department of Mechanical Engineering and the TREC Lab's lead faculty advisor on the DARPA project. “We are one of the few university teams in the United States who can develop both in-house robot hardware and software. We hope to show our integrated in-house hardware and software technology in California and contribute to the robotics community by demonstrating how the integrated technology can advance robotics research.”
During competition, robots will traverse a mock disaster scenario. They must walk over rubble, open and walk through a door, use power tools to cut a hole in a wall, climb a ladder, and rotate a valve. DARPA also plans a “surprise” challenge. Robots will operate by wireless remote control and autonomously. DARPA organizers said they will intentionally degrade wireless communications between team operators and in-field robots to mimic real disaster miscommunications and failures.
Each of the Virginia Tech-affiliated teams entered the competition in 2011. The semifinal round of competition was held in December 2013.
Despite the high-level nature of the project, competing teams readily trade information. Team ViGIR shared the operating software it designed and built with Team VALOR, both for ESCHER during competition and for another project headed by the lab, a U.S. Navy firefighting robot named SAFFIR.
“These competitions foster more collaboration among groups than strict competition,” said David Conner, an engineer with TORC and team manager for ViGIR. Team VALOR "helped to test and debug the software and provide another use case for the operator control interfaces we have developed. … It provides useful feedback for our ‘robot agnostic’ approach to interface development.”
Further, a team from the Massachusetts Institute of Technology made available to all competitors operating code it developed.
John Seminatore of Irvington, New York, and a master’s student in mechanical engineering, added: “While everyone wants to win the prize, we’re also in this to advance the field. … Much of what we’re looking forward to at the DRC is the opportunity to exchange ideas and share our work with our peers.”
Virginia Tech is a standout participant in the competition, which is expected to draw scores of media. It is one of four U.S. universities involved with two competing teams, according to Timothy Kilbride of DARPA’s public affairs office. “It’s an impressive undertaking to be involved in two teams,” he said.
TORC also is affiliated with a third team, Hector, headed by Germany’s Darmstadt. That team also is using the ViGIR-built software on in its robot, built by the company Robotis.
The competition was inspired by the 2011 earthquake in Japan that led to the meltdown of the Fukushima nuclear engineering plant. That event highlighted human limitations in responding to certain disasters. DARPA has said robotic response units could allow humans to quickly respond from a remote, safe location, thus saving lives and potentially millions of dollars in damage to infrastructure.
About Team VALOR
Team VALOR had an incredible past year. In fall 2014, the TREC lab – made up of graduate and undergraduate students from across the College of Engineering – successfully demonstrated that a humanoid robot is capable of assisting Navy personnel in the extinguishing fires aboard ships. That project, known as SAFFiR, short for Shipboard Autonomous Firefighting Robot, involved a 140-pound, 5-foot 10-inch robot originally named THOR. It's a separate robot from the newly built ESCHER.
ESCHER, short for Electric Series Compliant Humanoid for Emergency Response and named after the artist M.C. Escher for imaginative maze-like drawings, was designed and built from scratch by the lab's students. The robot's metal framing was milled inside the Goodwin Hall lab. Since April, team members have been testing the robot’s walking ability in the atrium of the building and then outside to see how it handled grass and rocky terrain.
ESCHER also stands 5 foot 10 inches, but it’s slightly lighter and far slicker.
After the Navy demonstration and the 2013 DARPA event, team members sought out a number of improvements. It has active runtime of more than two hours on batteries, sports knee torque capable of climbing stairs, features compliant body and impedance control arms so it can operate safely around people and objects, and it carries twice the computing power than SAFFiR. It also can carry – literally – up to 30 pounds in its arms. Software has been greatly improved, as have command stations to be used by robot operators. (Students named each station after a member of the Marvel Comic Universe along the likes of Daredevil, Iron Man, Dr. Strange, and more.)
“ESCHER is one of the lightest-weight, low-noise, and longest-runtime full-size humanoid robots in the challenge,” said Brian Lattimer, associate professor of mechanical engineering and a co-lead investigator on the project. “ESCHER is a robot that has a balancing and walking algorithm called whole body control that few in the world have successfully implemented onto a full-size humanoid robot, allowing it to be more adaptable to walking terrain and respond naturally to external disturbances.”
Lattimer, as with most members of the lab, sees ESCHER as a robot that can do more than responds to earthquake- or nuclear-damaged areas. Such robots can assist people in more mundane tasks, especially as the baby boomer population continues to age. “We are developing a future of robots that help people do their jobs more effectively and help keep their jobs longer,” he added.
Seminatore and his team, made up of students from mechanical engineering, electrical and computer engineering, and computer science, have tirelessly worked on ESCHER for months. “These projects wouldn’t have been the successes they are without the passion and dedication of the team,” he said.
“Months of 14 to 16 hour days are the norm. You simply can’t sustain that level of effort if you don’t truly believe in what you’re doing.”
About Team ViGIR
ViGIR, short for Virginia-Germany Interdisciplinary Robotics, includes TORC; two German-based universities, Technische Universitat Darmstadt and Leibniz University Hanover; Oregon State University; Cornell University; and Virginia Tech’s Center for Human-Computer Interaction, headed by Doug Bowman of the Department of Computer Science
Lead designer and developer for operator control station software, used to control the robot, is Felipe Bacim of Porto Alegre, Brazil, a doctoral student in computer science. “We designed the user interface and created visualizations to help operators assess the environment in which the robot is in and make sense of all the data that comes out of it,” said Bacim. “We also strive to make it as easy and quick as possible to command the robot and perform all different tasks we have.”
The robot, Florian, named after the patron saint of firefighters, received a major physical upgrade after December 2013, improving arm movement and its camera rig system, among other changes. TORC has housed Florian and its international team at a warehouse near its new Blacksburg headquarters.
During the competition, Bacim will act as the “eyes” of Florian. “I will use a head-mounted display with head-tracking and stereoscopic vision and controllers for 3-D navigation to act as a task observer in the virtual environment,” he said.
Assisting Bacim is Brian Wright of Goode, Virginia, who graduated with a bachelor’s degree in computer science in May 2015. He assists in writing and fixing bugs within software, among other tasks. “I've always wanted to work on robotics in a research setting, and I'm fortunate to be working on such a complex project working with big, flashy humanoid robots.”

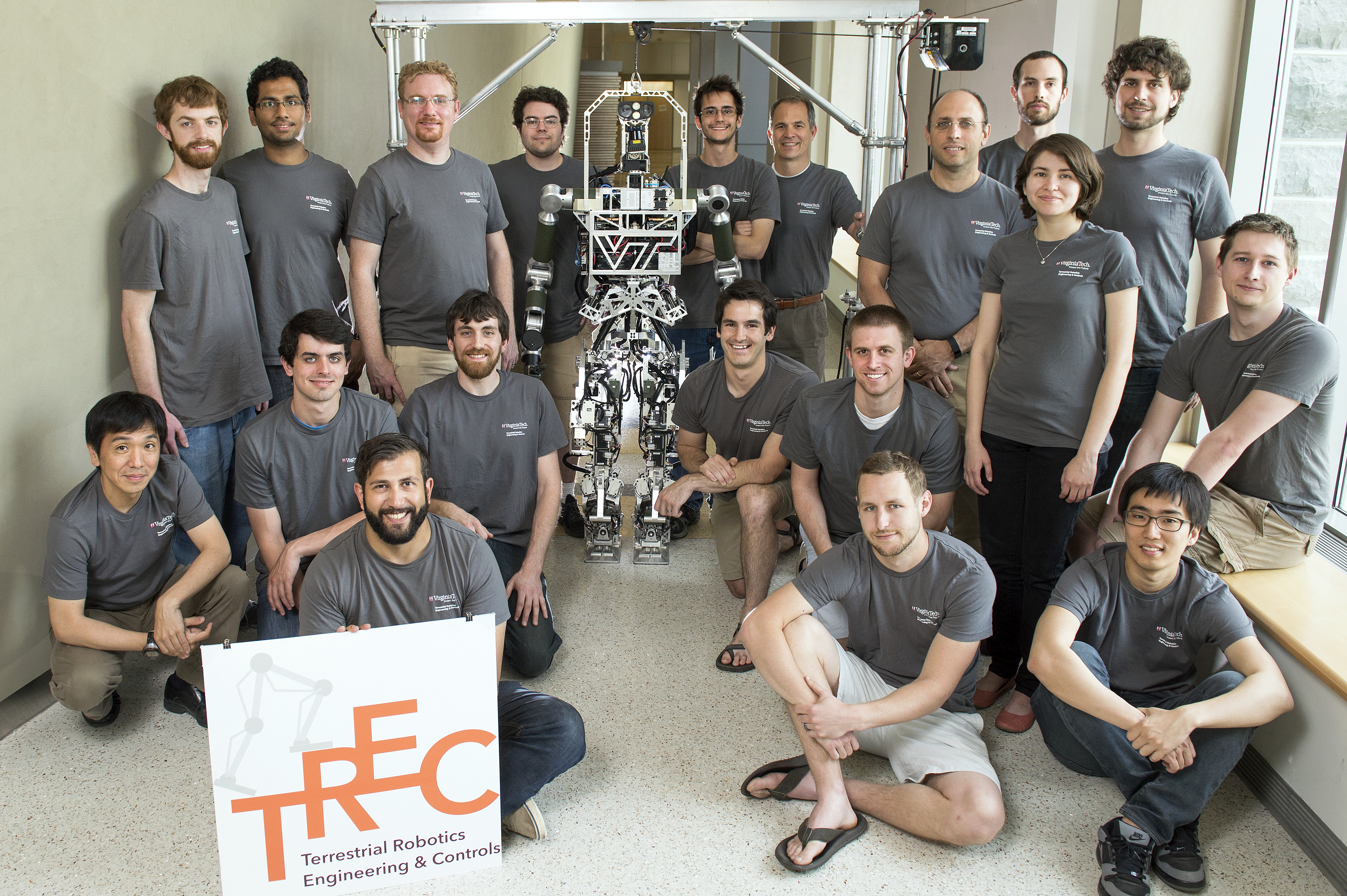
Virginia Tech's Team VALOR with ESCHER
The Terrestrial Robotics Engineering & Controls Lab is competing in the DARPA Robotics Challenge. Team members are, standing, from left, James Burton, Lakshitha Dantanarayana, Jason Ziglar, John Peterson, Jack Newton, Associate Professor Brian Lattimer, Associate Professor Alexander Leonessa, Mike Hopkins, Chris Nogales, and Nikolaus Wittenstein. Sitting, from left, are Professor Tomonari Furukawa, Graham Cantor-Cooke, John Seminatore, Coleman Knabe, Robert Griffin, Mike Rouleau, Jordan Neal, Yoonchang Sung, and Graham Day.

