Virginia Tech mechanical engineering lab receives autonomous driving simulator

Virginia Tech’s newest laboratory, the Autonomous Systems and Intelligent Machines (ASIM) lab, is home to a tiny town with robotic vehicles and a full-sized smart car. The lab will provide data-driven, scientific insight into how people interact with automated vehicle systems — a crucial new element to the real-world testing that seeks to improve transportation systems on a global scale.
The new lab, housed in Goodwin Hall on Virginia Tech’s Blacksburg campus, is split into two experiential learning areas to provide a broader picture of an autonomous environment.
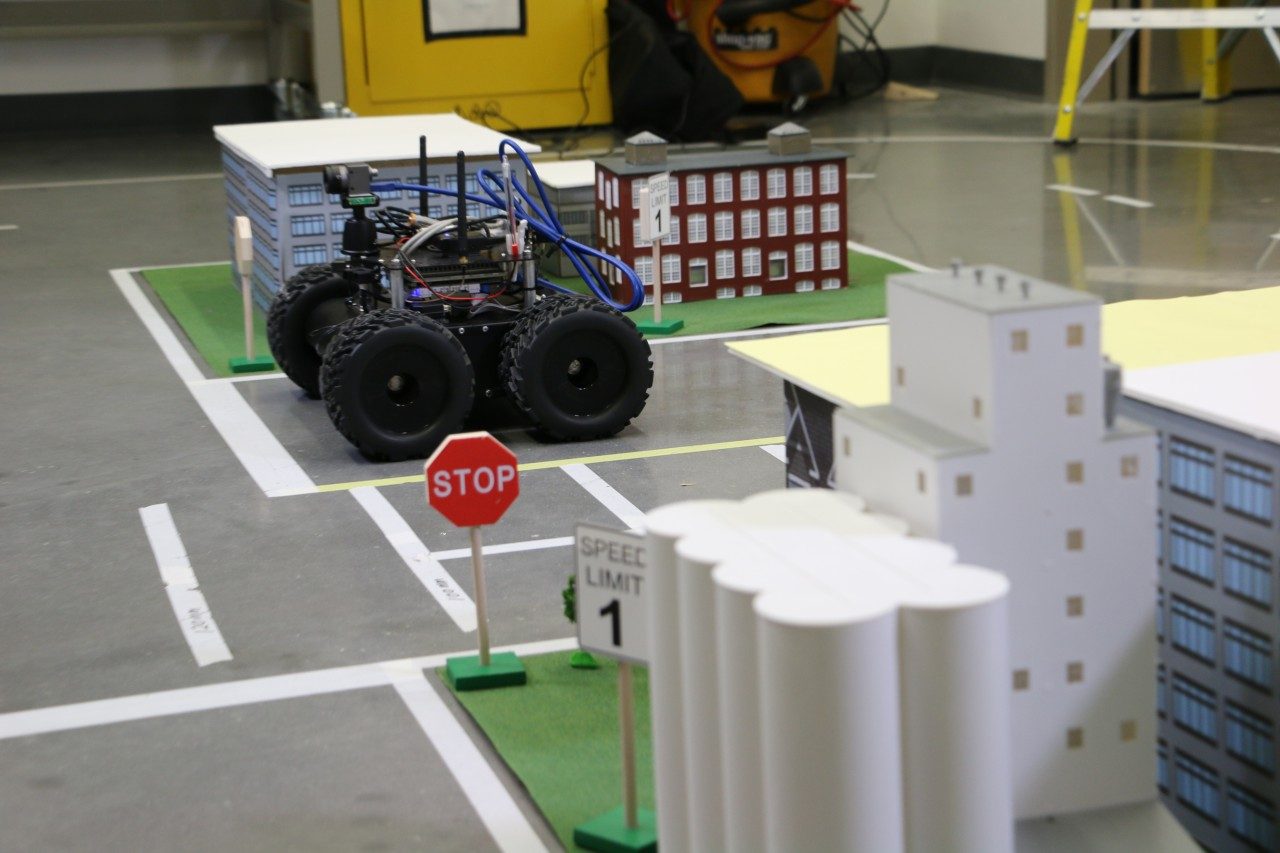
Half the lab is laid out to mimic a small town, complete with street patterns and road markings amidst miniature buildings. Robotic vehicles are used in place of real cars to emulate driving conditions. The robots are equipped with vision systems, proximity sensors, and inter-vehicle communications so they can sense presence and distance from each other, talk to each other, and navigate in traffic without colliding.
Rather than use GPS like full-sized vehicles, the lab is equipped with an overhead vision system that emulates GPS. The vision system gives a ground-truth relationship of the vehicle in relation to the floor map, and the environment helps researchers develop safety and control algorithms that allow the vehicles to follow each other and gain efficiency – speed – while in a platoon.
“Anyone can make a slow-moving autonomous vehicle,” said Azim Eskandarian, ASIM lab director and head of the mechanical engineering department in the College of Engineering. “But autonomy for its own sake isn’t enough – it has to be efficient as well. We are looking at how to determine the correct gaps between vehicles at given speeds and how to smoothly merge into a column of autonomous vehicles. There are control and safety challenges that need to be investigated here in the lab before we can test them using real vehicles.”
The robotic information is only half the story. Behind a black curtain that seperates the lab space, there is an actual car — a simulator — that allows the team of engineering students and faculty to access data that would be nearly impossible to get otherwise. A smart car with a 180-degree projection screen that can show a wide variety of roadway scenarios provides the primary focus, while another desktop driving station allows the team to have two drivers interact within the same digital roadway.
Simulators have traditionally been used for human factors in the driving environment. With two stations able to drive in the same scenario, the team can gather data on the interaction of manual and autonomous drivers in the same space.
The goal of the lab is to continue research that contributes to the safety and efficiency of autonomous and nonautonomous driving. The lab's focus is in both areas because, for the foreseeable future, Eskandarian believes manual driving will still have a place as the transition to autonomous vehicles continues.
With enhanced processing and video, researching collision avoidance has become far less expensive. As the technology becomes less expensive, standards are applied in today’s automobiles.
“If you combine all the safety systems over the last 20 years, you can see that our technology has been preparing us for autonomous vehicles,” Eskandarian said. “Lane departure warning systems, collision avoidance, sensors that tell you when you’re approaching a slower moving vehicle; all of these technologies are the same technologies that are required for autonomous vehicles. Our automobile market has, in effect, been preparing us for the transition to autonomous vehicles.”
For engineers, the future of automobiles centers on vehicles that can be driven manually or autonomously, and the ASIM lab provides a safe environment for simulations that can’t be conducted in a real-life environment.
“People will always enjoy driving and there are times where you want to drive and enjoy the control of the car,” Eskandarian said. “But there is always the downside of driving in traffic, or across miles of flat, monotonous highway, and autonomy can take the load off the task of driving. I see the future as a mixed environment where you can switch from one to the other, and most autonomous vehicles are like that, allowing the driver to take control.”
Written by Rosaire Bushey

A Smart Car is the primary simulator in the Autonomous Systems and Intelligent Machines Laboratory in the Department of Mechanical Engineering, but the system also includes a second simulator at a desktop station.