

Virginia Tech receives Department of Defense instrumentation awards

Virginia Tech has received three Department of Defense awards that support the purchase of state-of-the-art research equipment.
“The awards will enable us to support research and education in autonomous underwater vehicle, submarine, and ship hydrodynamics,” said Eric Paterson, head of the Kevin T. Crofton Department of Aerospace and Ocean Engineering. “We can further enhance Virginia Tech's world-class stability wind tunnel, advanced power and propulsion laboratory, and elevate numerous sponsored projects we have ongoing with the Office of Naval Research.”
Through the Defense University Research Instrumentation Program (DURIP), awards have been granted to 175 university researchers at 91 institutions, totaling $53 million. With these awards, undergraduate and graduate students will gain valuable experience in state-of-the-art facilities, training on cutting-edge technologies, and ultimately working to advance military research.
The awards are the result of a merit competition for DURIP funding conducted by the Army Research Office, Office of Naval Research, and Air Force Office of Scientific Research. The annual awards process is highly competitive with 671 proposals, requesting $254 million in funding.
Assistant Professor Christine Gilbert and Professor Craig Woolsey of the Kevin T. Crofton Department of Aerospace and Ocean Engineering received $620,057 from the Office of Naval Research for an instrumentation development program to modernize the 60-year-old towing tank located in Norris Hall.
The existing towing carriage will be completely removed and replaced with a simple frame design that will no longer allow researchers and students to ride on the carriage. The carriage will be remotely operated and equipped with cameras for monitoring, and a vertical planar motion mechanism will be installed to run nontraditional experiments. A dedicated data acquisition system and a suite of new sensors for experiments, such as force gauges, accelerometers, potentiometers, wave probes, inclinometers, and pressure sensors, will also be added to the tow tank.
The new upgrades will impact several research projects already funded by the Office of Naval Research. Gilbert is currently working on understanding the structural response due to slamming of high-speed craft in waves, funded through the Young Investigator Program.
Woolsey’s research is focused on developing a low-dimensional motion model for a submerged vessel maneuvering in waves, aimed at improving motion control performance and robustness. The improved towing facilities will provide valuable data to validate analytical and computational modeling results.
Associate Professor Stefano Brizzolara is researching the design of autonomous underwater and surface vessels with increased hydrodynamic performance in terms of propulsion and motions in waves. His work involves experiments in the tow tank facility that will also benefit from the improved towing carriage.
Students in the ocean engineering program will use the tow tank in their lab courses or for graduate and undergraduate research. They will be provided access and introduction to experimental techniques and tools that they can use to assess ocean system designs. The experience working on tow tank experiments at Virginia Tech is valuable job training for experimental work being performed at the Naval Surface Warfare Center Carderock Division or other laboratories.
Professor William Devenport, Associate Professor Todd Lowe, and Assistant Professor W. Nathan Alexander, all of the Kevin T. Crofton Department of Aerospace and Ocean Engineering, and Professor Wing Ng of the Department of Mechanical Engineering, will use the $476,132 research instrumentation grant for a state-of the-art time-resolved stereo particle image velocimetry system.
The new particle image velocimetry system, which measures airflow velocities, is capable of whole-plane flow field measurements at an unprecedented full-resolution rate.
For the first time, measurements will be calculated instantaneously and at speeds equal to those of the existing acoustic instrumentation in the wind tunnel used to monitor flow-generated noise or sound. This will be a major step forward in the documentation and understanding of aeroacoustic sources of interest to the Navy.
The system will be used at the Virginia Tech Stability Wind Tunnel and the Advanced Power and Propulsion Laboratory. At the stability tunnel, the system will combine with existing test section and microphone array systems to further enhance the aeroacoustic and aerodynamic capabilities in low-speed flows. At the advanced power and propulsion laboratory, the instrument will be an important step along the strategic development path, providing a number of research benefits to the Navy and better preparing student researchers for high impact contributions to the field.

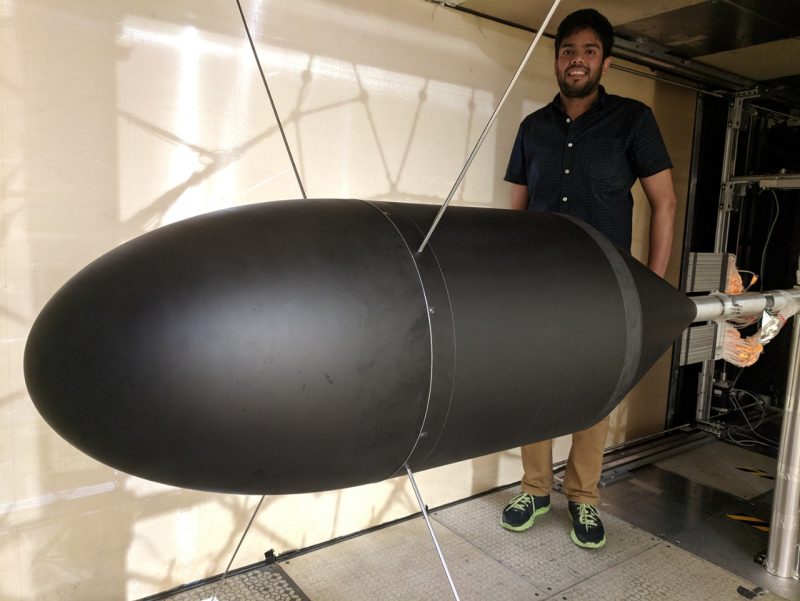
Professor Dan Stilwell of the Bradley Department of Electrical and Computer Engineering and affiliate faculty member to the department of aerospace and ocean engineering, received $455,285 from the Office of Naval Research to support experiments in collaborative autonomy and marine robotics. Stilwell will fabricate three 690 autonomous underwater vehicles to support field trials of advanced multivehicle coordination algorithms.
The 690 autonomous underwater vehicle is a mature system that has been developed jointly by Virginia Tech and the Naval Oceanographic Office. It is a streamlined, tail-controlled vehicle that displaces approximately 100 pounds and is depth-rated for 500 meters. The vehicles will be used to test new algorithms that compute search paths in real time while considering mission constraints, environmental variability, and sensor performance. The 690 autonomous underwater vehicles will test single vehicle algorithms and new approaches to multivehicle cooperative search.
Written By Jama Green



.jpg.transform/m-medium/image.jpg)